- D-Handとは
-
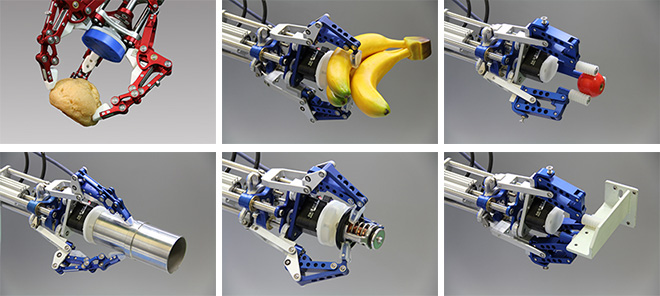
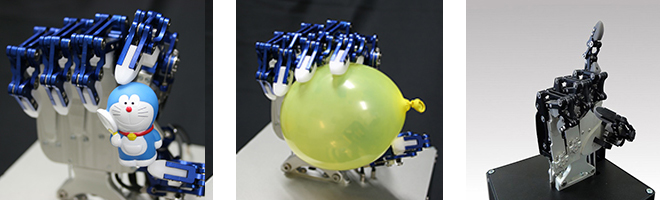
1個の駆動源でも動作し、様々な形状に対応するロボットハンドです。
- 人体の骨格構造を模擬することでセンサを用いることなく均一な力で把持動作を実現できる。
- 人の手の動力源である「腱」を「リンク機構」で再現し、指関節を四節リンクで繋ぎ、更に各指を協調リンクで繋ぐことで、対象形状に沿って 均一な把持力が達成できる。
私達は日常生活の中で、視覚情報から対象物の位置を捉え、意識することなく把持動作を行っています。
昨今の多品種な製品を扱う生産現場ではオペレータによる作業、または専用設計されたチャックハンドや真空吸着や電磁マグネット など、様々なエ ンドエフェクタが活用されています。
そこで、対象ワークの特性に左右されることなく、より安定した把持動作が可能で汎用性を持つマルチ・ロボットハンドがこのD-Handです。
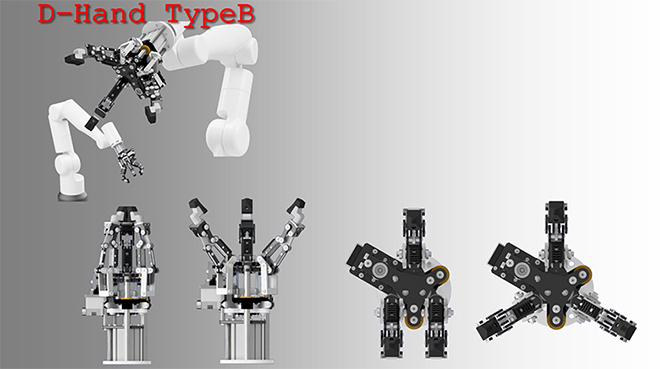
- D-Hand TypeB 3本指ロボットハンド
-
従来のD-Handに対し、“つかむ”、“つまむ”ための機能を向上!把握できる形状の種類が大幅に拡張されました。カスタマイズにも対応しています。
※この製品に採用されている技術は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の成果として得られたものです。
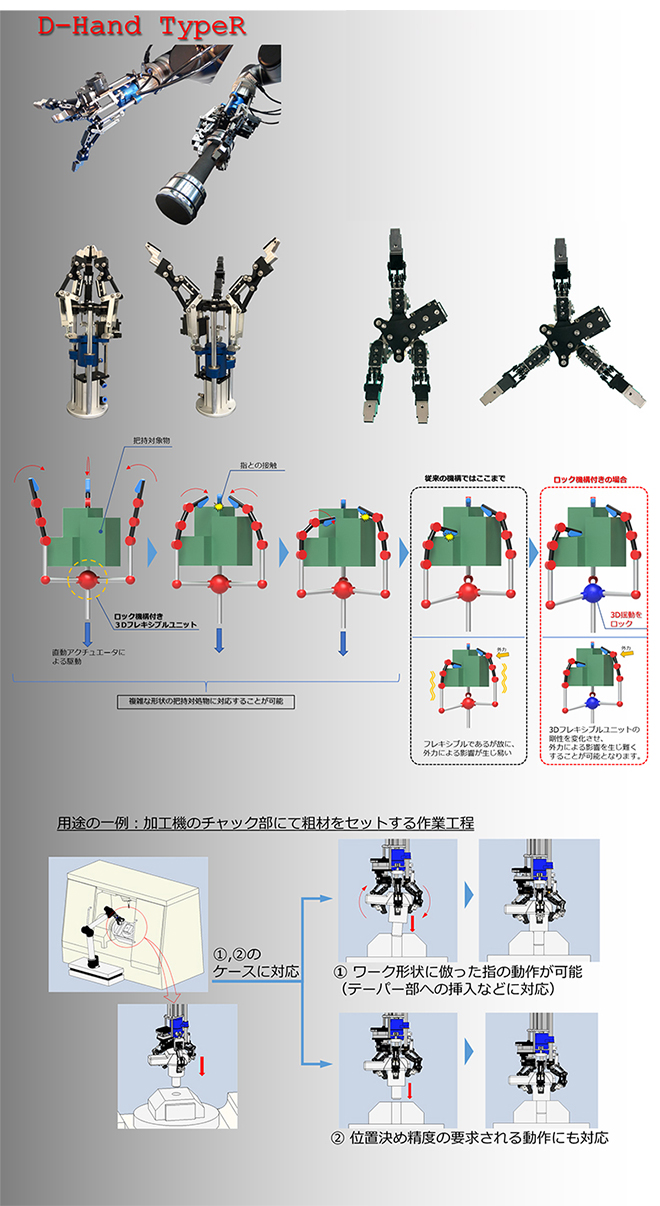
- D-Hand TypeR 3本指ロック機構付きロボットハンド
-
従来のD-Handの「つかむモノの形状にフレキシブルに対応する」把持の機能に加え、つかんだ後にその姿勢をロックすることにより、位置決め精度を向上させたD-Handです。
※この製品に採用されている技術は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の成果として得られたものです。
テレビ東京 ワールドビジネスサテライト トレンドたまご
2021年2月24日放送 【トレたま】 D-Hand 5ST
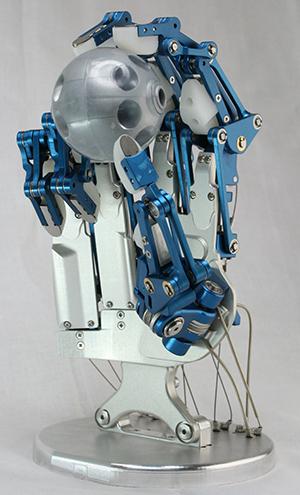
- D-Hand TypeA5 5本指ロボットハンド
-
人体とほぼ同様のサイズで最大8自由度を再現。
可動関節位置などの完全カスタマイズ対応可能。
- D-Hand TypeA3 / A3M 3本指ロボットハンド
-
1アクチュエータで把持動作を実現。
ワーク形状に追従し、把持するマルチハンド。
可搬重量や機能、自重などカスタム自由。