
- One Actuator Mechanism
-
圧力センサレスで均一な把持力(接触圧)で把持動作を行い、人体に近い自然な指先の太さや形状を実現できました。
人体における動力源である【腱】をリンク機構で再現し、全ての関節を一連の連動リンクとすることで、1個のアクチュエータによる 1入力で対象となる物体形状に沿って均一な把持力を持たせる把持動作が可能になりました。
- 1個のアクチュエータで把持動作が可能(把持計画と制御の簡略化)
- 使用用途・ユーティリティに合わせたアクチュエータを選択可能(電動・空圧・油圧)
- 指関節が適切に接触圧を分散するため圧力センサが必要なく、安定した物体把持が可能

- Gimbal Link Unit
-
D-Handは駆動伝達経路にある“やじろべえ式”のリンク機構「協調リンク機構」により、各関節への力を分散させてバランスを保ちつつ 必要最低限の力で把持できるような指関節の位置(関節角)を選択できるようになりました。
この協調リンク機構により適切な各指の位置を自動調節し、把持対象物に均等に力が分散するように加減して把持動作を行う「感覚的な把持動作」を実現しています。
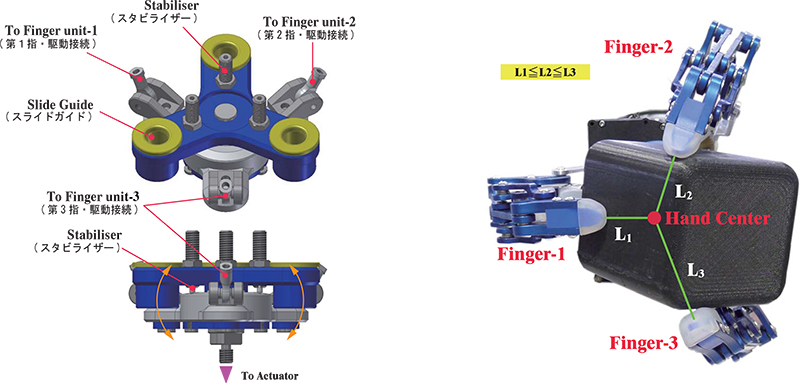
各指への駆動伝達リンクを“やじろべえ式”に接合した協調リンク機構ユニットをアクチュエータにより動作させることで各関節が動作します。
この時、全ての指が把持対象の外形に接触するまでリンクは動作を続け把持物体からの反力(接触圧)が各指へ均等になるように自動的に バランスを取り続けるので安定した把持動作が可能になりました。
D-Handは持対象物の形状に複雑な凹凸が存在するような形状でも把持することが可能になり「協調リンク機構」により各指へ異なる引張量の駆動力を伝達できるため、“引張量=指の開閉”のD-Handは対象となる把持物体の凹凸にメカニカルに追従し馴染むハンドリングを実現 します。
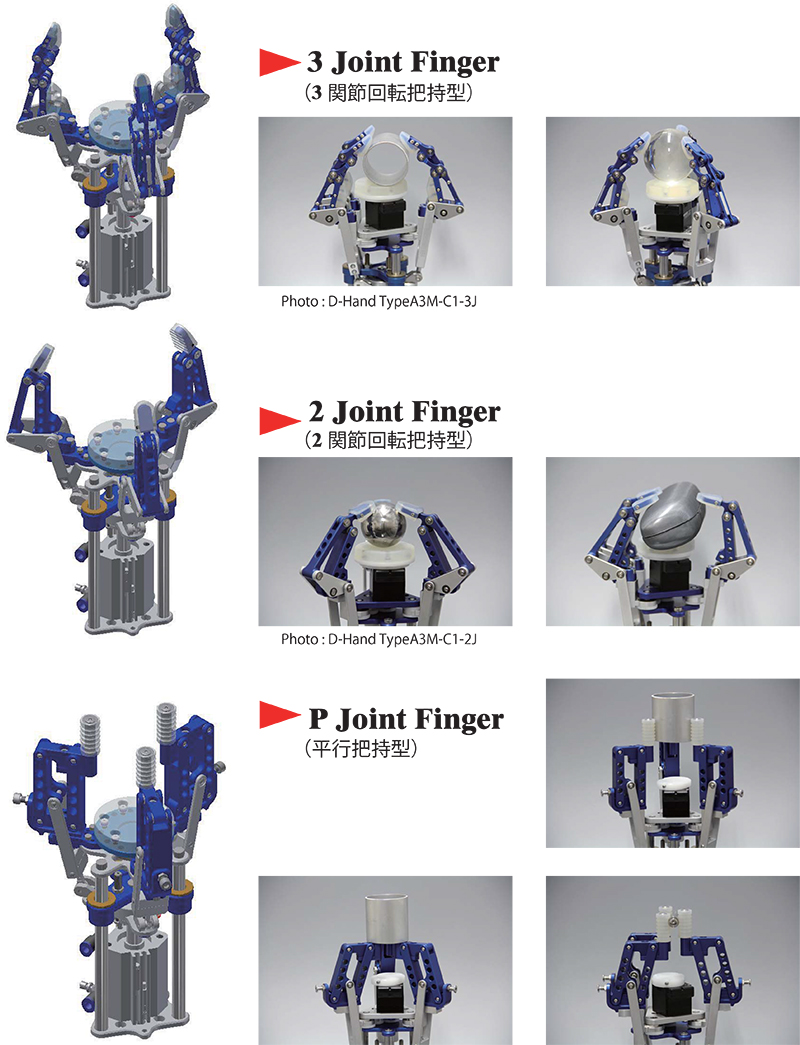
- Finger Link Unit
-
D-Handは、多品種・多形状な形状を安定して把持し、ユーザに最も求められる「掴む」・「握る」把持機能に特化させたロボットハンドです。
特有の「協調リンク機構」と「四節リンク機構」から構成される指を併設することで、従来の専用設計されたロボットハンドにはない汎用性を持っています。
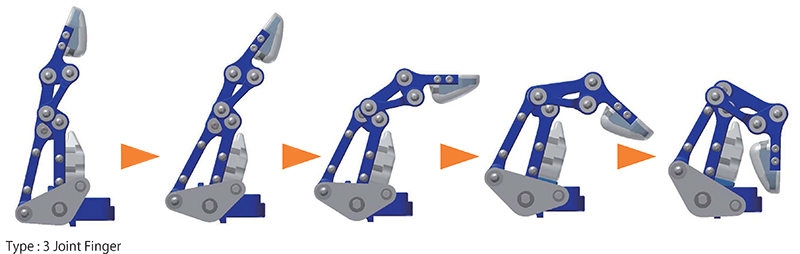
また、各指関節を一連の連動リンク機構で拘束することにより1個のアクチュエータによる入力で対象物の形状に沿って均一な把持力(接触圧)で把持し、機械的に把持対象物に沿って対象物の形状・位置、構成を最適化することによって目的とする把持計画の 制御を簡略化と汎用性を実現しました。
D-Hand(Type A3H / A3M)はターゲットワークの形状や把持姿勢に応じてFinger typeを選択できます。 いずれのFinger Typeを選択しても、ロボットハンドに求められる把持動作である「掴む」・「握る」の把持機能をそのままに、特徴である 「協調リンク機構」と併設することで、従来の専用設計されたロボットハンドにはない汎用性を実現しています。
これにより、従来の専用設計されたチャックハンドでは多品種・多形状生産における課題であったツールチェンジが大幅に減らすことができ、汎用性を持たせたマルチハンドとしてご使用が可能になります。
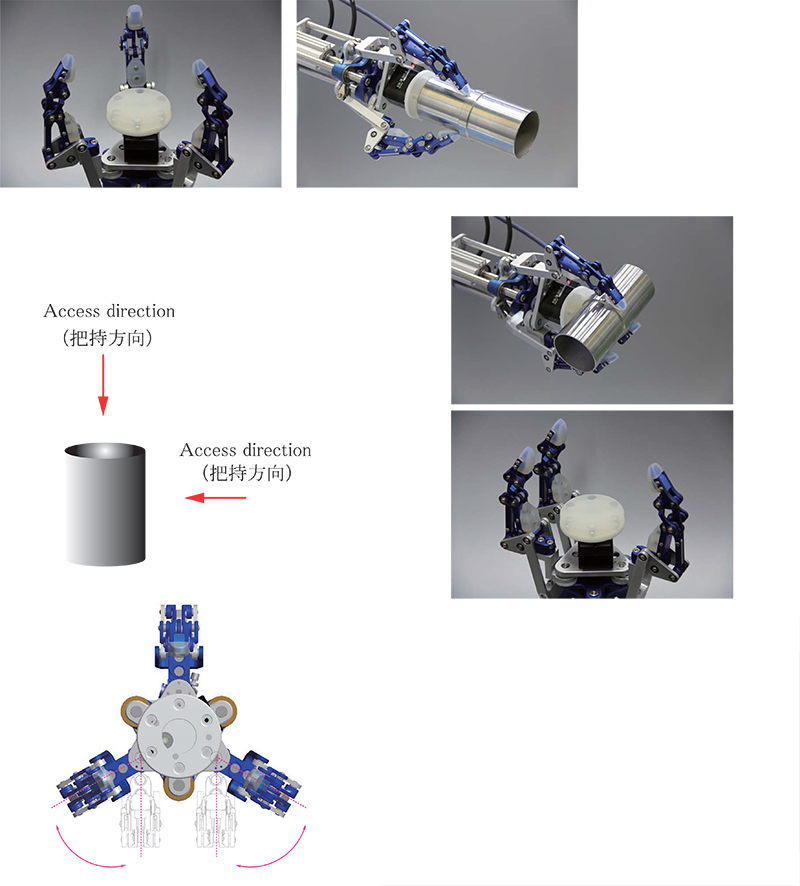
- Palm Unit
-
D-Hand(TypeA3M)は手のひらに取付けた小型サーボモータで3指の配列角度を自動で可変することができます。
この特徴により左図のように把持方向によって可変角度を変更し、より安定した把持動作を実現できます。
*TypeA3Hは手動で固定ボルトを5付け替えることによって、同様の機能を使用することができます。
- 新旧型式変更のご案内
-
旧型式 新型式 Type A3H → Type 3AG/3AP Type A3M → Type 3AG/3AP Type B3M → Type 3BG Type R3M → Type 3BG Type A3F → Type 3CG Type B3M → Type 3CG